קישור להדפסת השאלה

______________________________________________________________________________________
...
כוח החיכוך, הכביש מפעיל את כוח החיכוך.
יש להבין באופן כללי את כוח החיכוך, לדעת שכוח החיכוך יכול גם לגרום לתנועה.
כאשר המכונית מתחילה בנסיעה , גלגלי המכונית דוחפים את הכביש אחורה,בכוח החיכוך.
מהחוק השלישי של ניוטון הכביש מפעיל כוח חיכוך על המכונית בכיוון הנסיעה, כוח זה הוא הכוח הגורם למכונית לנסוע.
הכוח הפועל על המכונית הוא כוח חיכוך, והוא מופעל על ידי הכביש.
מהחוק השלישי של ניוטון הכביש מפעיל כוח חיכוך על המכונית בכיוון הנסיעה, כוח זה הוא הכוח הגורם למכונית לנסוע.
הכוח הפועל על המכונית הוא כוח חיכוך, והוא מופעל על ידי הכביש.
במסגרת תוכנית הלימודים נלמדים שני סוגים של כוחות חיכוך. כוח חיכוך סטטי וכוח חיכוך קינטי.
כוח החיכוך יותר מורכב והוא דורש הבנה מעמיקה יותר.
במקרה זה כוח החיכוך המניע את המכונית הוא כוח חיכוך סטטי , וכוח החיכוך הפועל נגד כיוון התנועה כוח חיכוך מסוג גלגול.
כדי לענות על שאלות הבגרות, יש להכיר את כוח החיכוך הקינטי , ואת כוח החיכוך הסטטי , וכמובן את הרעיון הכללי של כוח החיכוך.
כוח החיכוך יותר מורכב והוא דורש הבנה מעמיקה יותר.
במקרה זה כוח החיכוך המניע את המכונית הוא כוח חיכוך סטטי , וכוח החיכוך הפועל נגד כיוון התנועה כוח חיכוך מסוג גלגול.
כדי לענות על שאלות הבגרות, יש להכיר את כוח החיכוך הקינטי , ואת כוח החיכוך הסטטי , וכמובן את הרעיון הכללי של כוח החיכוך.
______________________________________________________________________________________

______________________________________________________________________________________
...
הקרח גורם להקטנת מקדם החיכוך , כוח החיכוך קטן, כוח החיכוך הוא הכוח המניע אתה מכונית , מכיוון שהוא קטן גם תאוצת המכונית קטנה.
יש לקשר בין הוספת הקרח לכוח החיכוך . ובין השינוי בכוח החיכוך לשינוי בתאוצה.
הוספת הקרח גורמת להקטנת כוח החיכוך , המכונית מפעילה על הכביש כוח חיכוך קטן יותר. ובתגובה הכביש מפעיל על המכונית כוח חיכוך יותר קטן, לכן תאוצת המכונית יותר קטנה.
לפעמים קל להבין את העקרונות ממקרים קיצוניים.
אם הכביש היה חלק לחלוטין , המכונית לא הייתה יכולה להפעיל כוח חיכוך על הכביש, ומהחוק השלישי גם הכביש לא היה יכול להפעיל כוח על המכונית.
לכן מכונית הנחה על משטח חלק לחלוטין לא יכולה לנוע.
אם המשטח מעט חלק , אבל לא חלק לחלוטין, המכונית יכולה לנוע , אך תאוצתה תהיה מוגבלת.
אם הכביש היה חלק לחלוטין , המכונית לא הייתה יכולה להפעיל כוח חיכוך על הכביש, ומהחוק השלישי גם הכביש לא היה יכול להפעיל כוח על המכונית.
לכן מכונית הנחה על משטח חלק לחלוטין לא יכולה לנוע.
אם המשטח מעט חלק , אבל לא חלק לחלוטין, המכונית יכולה לנוע , אך תאוצתה תהיה מוגבלת.
______________________________________________________________________________________
______________________________________________________________________________________
...
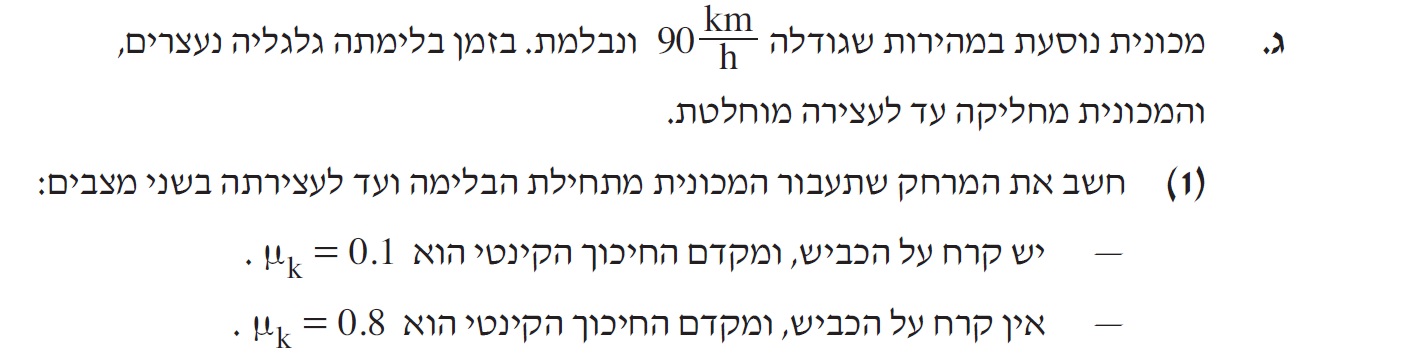
עבור מקדם שגודלו 0.1 , העתק התנועה הוא : 312.5 מטרים.
עבור מקדם שגודלו 0.8 , העתק התנועה הוא : 39.06 מטרים.
עבור מקדם שגודלו 0.8 , העתק התנועה הוא : 39.06 מטרים.
יש לערוך תרשים כוחות ולכתוב את משוואות התנועה, ממשוואות התנועה לפתח את ביטוי המרחק שעוברת המכונית , ולמצוא בעזרת ביטוי זה את העתקי התנועה עבור כל אחד משני ערכי מקדם החיכוך .
נפתח ביטוי למרחק שעוברת המכונית בתלות במקדם החיכוך.
לשם כך, נערוך תרשים כוחות ונכתוב את משוואות התנועה , ונפתח את הביטוי הדרוש בעזרת משוואות התנועה.
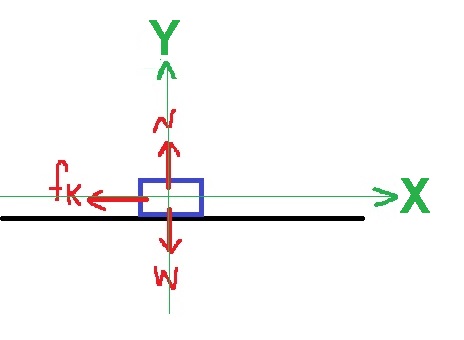
נבחר ציר תנועה אופקי שכיוונו ככיוון התנועה.
נכתוב את משוואות התנועה לכיוון האופקי ולכיוון האנכי:
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#931;F«/mi»«mi mathvariant=¨bold¨»y«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»0«/mn»«mspace linebreak=¨newline¨»«/mspace»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»N«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»W«/mi»«mspace linebreak=¨newline¨»«/mspace»«menclose mathcolor=¨#0000FF¨ notation=¨box¨»«mi mathvariant=¨bold¨»N«/mi»«mo mathvariant=¨bold¨»=«/mo»«mi mathvariant=¨bold¨»mg«/mi»«/menclose»«/math» «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#931;F«/mi»«mi mathvariant=¨bold¨»X«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»m«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«mspace linebreak=¨newline¨»«/mspace»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»-«/mo»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»f«/mi»«mi mathvariant=¨bold¨»k«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»m«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«mspace linebreak=¨newline¨»«/mspace»«menclose mathcolor=¨#0000FF¨ notation=¨box¨»«mo mathvariant=¨bold¨»-«/mo»«msub»«mi mathvariant=¨bold¨»§#956;«/mi»«mi mathvariant=¨bold¨»k«/mi»«/msub»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»N«/mi»«mo mathvariant=¨bold¨»=«/mo»«mi mathvariant=¨bold¨»m«/mi»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»a«/mi»«/menclose»«/math»
נציב את הנורמל ממשוואת התנועה האנכית במשוואת התנועה האופקית.
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»-«/mo»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#956;«/mi»«mi mathvariant=¨bold¨»k«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»N«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»m«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«mspace linebreak=¨newline¨»«/mspace»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»-«/mo»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#956;«/mi»«mi mathvariant=¨bold¨»k«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»m«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#FF0000¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»g«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»m«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«/math»
נבטא את התאוצה בתלות במקדם החיכוך:
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»-«/mo»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#956;«/mi»«mi mathvariant=¨bold¨»k«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«menclose mathcolor=¨#0000FF¨ notation=¨downdiagonalstrike¨»«mi mathvariant=¨bold¨»m«/mi»«/menclose»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»g«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«menclose mathcolor=¨#0000FF¨ notation=¨downdiagonalstrike¨»«mi mathvariant=¨bold¨»m«/mi»«/menclose»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«mspace linebreak=¨newline¨»«/mspace»«mspace linebreak=¨newline¨»«/mspace»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»-«/mo»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#956;«/mi»«mi mathvariant=¨bold¨»k«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»g«/mi»«/math»
גודלה של המהירות ההתחלתית 90 קמ"ש שהם 25 מטר לשנייה.
נבטא מריבוע המהירויות את העתק התנועה בהתאם לביטוי התאוצה ולמהירות ההתחלתית:
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«mrow»«msup mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»V«/mi»«mn mathvariant=¨bold¨»2«/mn»«/msup»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«msup mathcolor=¨#0000FF¨»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»V«/mi»«mn mathvariant=¨bold¨»0«/mn»«/msub»«mn mathvariant=¨bold¨»2«/mn»«/msup»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»+«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»2«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#8710;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»x«/mi»«mspace linebreak=¨newline¨»«/mspace»«mspace linebreak=¨newline¨»«/mspace»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#8710;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»x«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mrow»«msup»«mi mathvariant=¨bold¨»V«/mi»«mn mathvariant=¨bold¨»2«/mn»«/msup»«mo mathvariant=¨bold¨»-«/mo»«msup»«msub»«mi mathvariant=¨bold¨»V«/mi»«mn mathvariant=¨bold¨»0«/mn»«/msub»«mn mathvariant=¨bold¨»2«/mn»«/msup»«/mrow»«mrow»«mn mathvariant=¨bold¨»2«/mn»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»a«/mi»«/mrow»«/mfrac»«/mrow»«/mstyle»«/math»
בסוף התנועה המהירות של המכונית היא אפס. נציב את ביטוי התאוצה ואת ערכי המהירויות:
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#8710;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»x«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mrow»«msup»«mi mathvariant=¨bold¨»V«/mi»«mn mathvariant=¨bold¨»2«/mn»«/msup»«mo mathvariant=¨bold¨»-«/mo»«msup»«msub»«mi mathvariant=¨bold¨»V«/mi»«mn mathvariant=¨bold¨»0«/mn»«/msub»«mn mathvariant=¨bold¨»2«/mn»«/msup»«/mrow»«mrow»«mn mathvariant=¨bold¨»2«/mn»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»a«/mi»«/mrow»«/mfrac»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mrow»«msup»«mn mathvariant=¨bold¨»0«/mn»«mn mathvariant=¨bold¨»2«/mn»«/msup»«mo mathvariant=¨bold¨»-«/mo»«msup»«mn mathvariant=¨bold¨»25«/mn»«mn mathvariant=¨bold¨»2«/mn»«/msup»«/mrow»«mrow»«mn mathvariant=¨bold¨»2«/mn»«mo mathvariant=¨bold¨»§#183;«/mo»«mo mathvariant=¨bold¨»(«/mo»«mo mathvariant=¨bold¨»-«/mo»«mi mathvariant=¨bold¨»§#956;«/mi»«mi mathvariant=¨bold¨»k«/mi»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»g«/mi»«mo mathvariant=¨bold¨»)«/mo»«/mrow»«/mfrac»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mrow»«mo mathvariant=¨bold¨»-«/mo»«mn mathvariant=¨bold¨»625«/mn»«/mrow»«mrow»«mo mathvariant=¨bold¨»-«/mo»«mn mathvariant=¨bold¨»2«/mn»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»§#956;k«/mi»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»g«/mi»«/mrow»«/mfrac»«mspace linebreak=¨newline¨»«/mspace»«mspace linebreak=¨newline¨»«/mspace»«menclose mathcolor=¨#0000FF¨ notation=¨circle¨»«mo mathvariant=¨bold¨»§#8710;«/mo»«mi mathvariant=¨bold¨»x«/mi»«mo mathvariant=¨bold¨»=«/mo»«mfrac»«mrow»«mn mathvariant=¨bold¨»312«/mn»«mo mathvariant=¨bold¨».«/mo»«mn mathvariant=¨bold¨»5«/mn»«/mrow»«mrow»«mi mathvariant=¨bold¨»§#956;k«/mi»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»g«/mi»«/mrow»«/mfrac»«/menclose»«mspace linebreak=¨newline¨»«/mspace»«mspace linebreak=¨newline¨»«/mspace»«/mstyle»«/math»
נמצא את גודל ההעתק התנועה כאשר יש קרח על הכביש ומקדם החיכוך הקינטי הוא 0.1 :
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#8710;«/mo»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»x«/mi»«mn mathvariant=¨bold¨»1«/mn»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mrow»«mn mathvariant=¨bold¨»312«/mn»«mo mathvariant=¨bold¨».«/mo»«mn mathvariant=¨bold¨»5«/mn»«/mrow»«mrow»«mi mathvariant=¨bold¨»§#956;k«/mi»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»g«/mi»«/mrow»«/mfrac»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mrow»«mn mathvariant=¨bold¨»312«/mn»«mo mathvariant=¨bold¨».«/mo»«mn mathvariant=¨bold¨»5«/mn»«/mrow»«mrow»«mn mathvariant=¨bold¨»0«/mn»«mo mathvariant=¨bold¨».«/mo»«mn mathvariant=¨bold¨»1«/mn»«mo mathvariant=¨bold¨»§#183;«/mo»«mn mathvariant=¨bold¨»10«/mn»«/mrow»«/mfrac»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»312«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»5«/mn»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»m«/mi»«/mstyle»«/math»
נמצא את גודל ההעתק התנועה כאשר יש קרח על הכביש ומקדם החיכוך הקינטי הוא 0.8 :
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#8710;«/mo»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»x«/mi»«mn mathvariant=¨bold¨»2«/mn»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mrow»«mn mathvariant=¨bold¨»312«/mn»«mo mathvariant=¨bold¨».«/mo»«mn mathvariant=¨bold¨»5«/mn»«/mrow»«mrow»«mn mathvariant=¨bold¨»0«/mn»«mo mathvariant=¨bold¨».«/mo»«mn mathvariant=¨bold¨»8«/mn»«mo mathvariant=¨bold¨»§#183;«/mo»«mn mathvariant=¨bold¨»10«/mn»«/mrow»«/mfrac»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»39«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»06«/mn»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»m«/mi»«/mstyle»«/math»
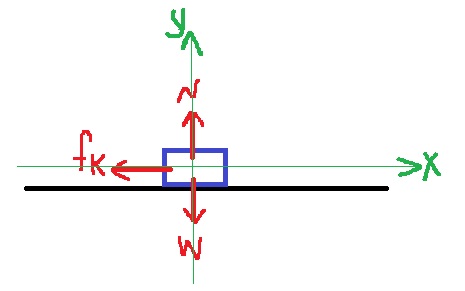
נערוך תרשים כוחות ונכתוב את משוואות התנועה , ונפתח את הביטוי הדרוש ממשוואות התנועה.
נבחר ציר תנועה אופקי שכיוונו ככיוון התנועה.
נכתוב את משוואות התנועה לכיוון האופקי ולכיוון האנכי:
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#931;F«/mi»«mi mathvariant=¨bold¨»y«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»0«/mn»«mspace linebreak=¨newline¨»«/mspace»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»N«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»W«/mi»«mspace linebreak=¨newline¨»«/mspace»«menclose mathcolor=¨#0000FF¨ notation=¨box¨»«mi mathvariant=¨bold¨»N«/mi»«mo mathvariant=¨bold¨»=«/mo»«mi mathvariant=¨bold¨»mg«/mi»«/menclose»«/math» «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#931;F«/mi»«mi mathvariant=¨bold¨»X«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»m«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«mspace linebreak=¨newline¨»«/mspace»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»-«/mo»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»f«/mi»«mi mathvariant=¨bold¨»k«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»m«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«mspace linebreak=¨newline¨»«/mspace»«menclose mathcolor=¨#0000FF¨ notation=¨box¨»«mo mathvariant=¨bold¨»-«/mo»«msub»«mi mathvariant=¨bold¨»§#956;«/mi»«mi mathvariant=¨bold¨»k«/mi»«/msub»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»N«/mi»«mo mathvariant=¨bold¨»=«/mo»«mi mathvariant=¨bold¨»m«/mi»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»a«/mi»«/menclose»«/math»
נציב את הנורמל ממשוואת התנועה האנכית במשוואת התנועה האופקית.
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#931;F«/mi»«mi mathvariant=¨bold¨»X«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»m«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«mspace linebreak=¨newline¨»«/mspace»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»-«/mo»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»f«/mi»«mi mathvariant=¨bold¨»k«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»m«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«mspace linebreak=¨newline¨»«/mspace»«menclose mathcolor=¨#0000FF¨ notation=¨box¨»«mo mathvariant=¨bold¨»-«/mo»«msub»«mi mathvariant=¨bold¨»§#956;«/mi»«mi mathvariant=¨bold¨»k«/mi»«/msub»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»N«/mi»«mo mathvariant=¨bold¨»=«/mo»«mi mathvariant=¨bold¨»m«/mi»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»a«/mi»«/menclose»«/math»
1. המהירות ההתחלתית נתונה ביחידות של קמ"ש, יחידות אלו הן יחידות לא תקניות. יש להציב את ערך המהירות ביחידות של מטר לשנייה.
2. המכונית נעה בקו ישר ,עד לעצירתה. המרחק שהמכונית עוברת שווה להעתק התנועה. לכן יש למצוא את ההעתק ביחס לציר תנועה נבחר.
3. בזמן הבלימה גלגלי המכונית נעצרים, המכונית מחליקה על הכביש , לכן אפשר להשתמש בהגדרת כוח החיכוך הקינטי , מקדם החיכוך הנתון הוא של כוח החיכוך הקינטי.
2. המכונית נעה בקו ישר ,עד לעצירתה. המרחק שהמכונית עוברת שווה להעתק התנועה. לכן יש למצוא את ההעתק ביחס לציר תנועה נבחר.
3. בזמן הבלימה גלגלי המכונית נעצרים, המכונית מחליקה על הכביש , לכן אפשר להשתמש בהגדרת כוח החיכוך הקינטי , מקדם החיכוך הנתון הוא של כוח החיכוך הקינטי.
______________________________________________________________________________________

______________________________________________________________________________________
...
ככל שמרחק הבלימה גדול יותר בבלימת חירום המרחק שתעבור המכונית יהיה גדול יותר. ויכולת הנהגים למנוע תאונות תהיה קטנה יותר, לכן הכבישים נסגרים.
יש להבין בהיגיון כללי את הקשר שבין מרחק הבלימה הגדול , ולסגירת הכביש.
ככל שמרחק הבלימה גדול יותר בבלימת חירום המרחק שתעבור המכונית יהיה גדול יותר. ויכולת הנהגים למנוע תאונות תהיה קטנה יותר, לכן הכבישים נסגרים.
יש שאלות שדי בהיגיון כללי כדי לענות עליהם . בד"כ שאלות כאלו הן מאוד פשוטות.
לא צריך להתרגש או לחשוש . יש גם שאלות כאלו.
לא צריך להתרגש או לחשוש . יש גם שאלות כאלו.
______________________________________________________________________________________
 ______________________________________________________________________________________
______________________________________________________________________________________
...
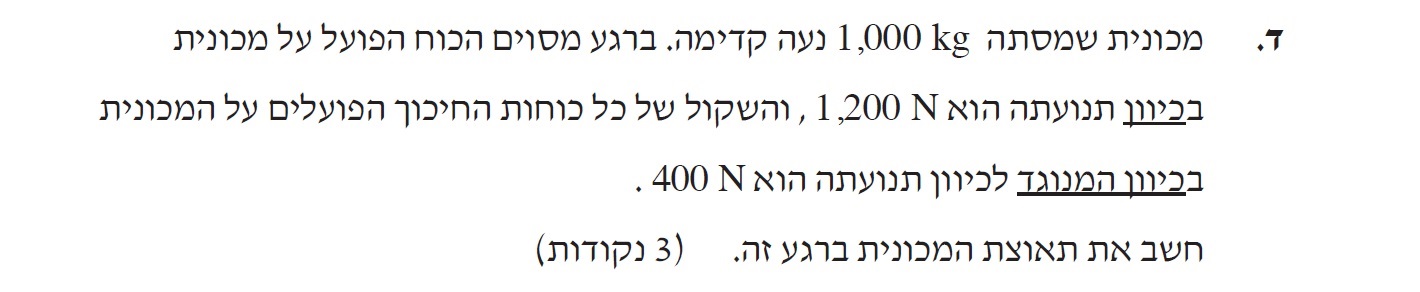
התאוצה היא 0.8 מטר לשנייה בריבוע , וכיוונה ככיון ציר התנועה.
עריכת תרשים כוחות ,וכתיבת משוואות התנועה.
נערוך תרשים כוחות על המכונית נסמן את שקול כוחות החיכוך הפועלים בכיוון המנוגד ב 'fk, ואת הכוח הפועל בכיוון התנועה ב F:
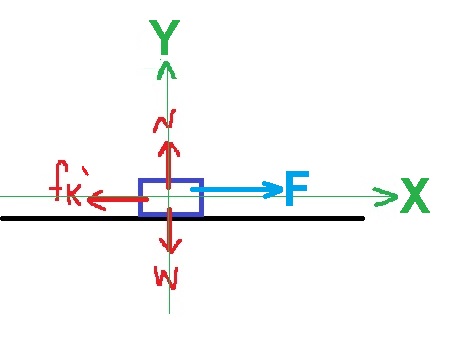
נכתוב את משוואות התנועה לכיוון האופקי ולכיוון האנכי:
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#931;F«/mi»«mi mathvariant=¨bold¨»y«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»0«/mn»«mspace linebreak=¨newline¨»«/mspace»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»N«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»W«/mi»«mspace linebreak=¨newline¨»«/mspace»«menclose mathcolor=¨#0000FF¨ notation=¨box¨»«mi mathvariant=¨bold¨»N«/mi»«mo mathvariant=¨bold¨»=«/mo»«mi mathvariant=¨bold¨»mg«/mi»«/menclose»«/math» «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«msub mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#931;F«/mi»«mi mathvariant=¨bold¨»X«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»m«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«mspace linebreak=¨newline¨»«/mspace»«menclose mathcolor=¨#0000FF¨ notation=¨box¨»«mi mathvariant=¨bold¨»F«/mi»«mo mathvariant=¨bold¨»-«/mo»«msub»«mi mathvariant=¨bold¨»f«/mi»«mi mathvariant=¨bold¨»k«/mi»«/msub»«mo mathvariant=¨bold¨»`«/mo»«mo mathvariant=¨bold¨»=«/mo»«mi mathvariant=¨bold¨»m«/mi»«mo mathvariant=¨bold¨»§#183;«/mo»«mi mathvariant=¨bold¨»a«/mi»«/menclose»«/math»
נבטא את התאוצה ממשוואת התנועה האופקית , ונמצא את גודלה בהתאם לנתוני השאלה :
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»a«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mrow»«mi mathvariant=¨bold¨»F«/mi»«mo mathvariant=¨bold¨»-«/mo»«mi mathvariant=¨bold¨»fk«/mi»«mo mathvariant=¨bold¨»`«/mo»«/mrow»«mi mathvariant=¨bold¨»m«/mi»«/mfrac»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mrow»«mn mathvariant=¨bold¨»1200«/mn»«mo mathvariant=¨bold¨»-«/mo»«mn mathvariant=¨bold¨»400«/mn»«/mrow»«mn mathvariant=¨bold¨»1000«/mn»«/mfrac»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»0«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»8«/mn»«mfrac mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»m«/mi»«msup»«mi mathvariant=¨bold¨»s«/mi»«mn mathvariant=¨bold¨»2«/mn»«/msup»«/mfrac»«/math»
לכן תאוצת המכונית היא 0.8 מטר לשנייה בריבוע. התאוצה חיובית, לכן כיוון התאוצה הוא ככיוון התנועה.
1. בנוסף למציאת גודל התאוצה, יש לציין גם את כיוונה . פתרון המכיל רק את ערך התאוצה לא מזכה בניקוד מלא.
2. לא תמיד יש צורך להשתמש בכל משוואות התנועה , במקרה זה השתמשנו במשוואת התנועה האופקית בלבד.
חשוב לכתוב את כל משוואות התנועה ורק אחר כך להחליט באיזו משוואה להשתמש.
2. לא תמיד יש צורך להשתמש בכל משוואות התנועה , במקרה זה השתמשנו במשוואת התנועה האופקית בלבד. חשוב לכתוב את כל משוואות התנועה ורק אחר כך להחליט באיזו משוואה להשתמש.
______________________________________________________________________________________

______________________________________________________________________________________
...
כוח החיכוך גדל ככל שהמהירות גדלה. כאשר המהירות מספיק גדולה כך שכוח החיכוך שווה בגודלו לכוח המניע את המכונית שקול הכוחות הפועלים על המכונית יהיה אפס. המכונית תתמיד בתנועתה והמהירות לא תגדל. לכן לכל מכונית יש מהירות מקסימאלית.
הכוח המניע את המכונית הוא קבוע , וכוח החיכוך הולך וגדל ככל שהמהירות גדלה.
כוח החיכוך גדל ככל שהמהירות גדלה. כאשר המהירות מספיק גדולה כך שכוח החיכוך שווה בגודלו לכוח המניע את המכונית שקול הכוחות הפועלים על המכונית יהיה אפס. המכונית תתמיד בתנועתה והמהירות לא תגדל. לכן לכל מכונית יש מהירות מקסימאלית.
1.תנועת הגוף תלויה בכוחות הפועלים על הגוף, במקרה מיוחד זה התנועה(גודל המהירות) קובעת את גודל הכוח הפועל על המכונית.
2.בכל מקרה בו פועל כוח הולך וגדל נגד כיוון התנועה , המהירות תגדל בקצב הולך וקטן ,בתאוצה הולכת וקטנה, עד שהתאוצה תהיה אפס .
והגוף יגיע למהירויות המקסימאלית.
3. סעיף זה נשען על הבנת הדינמיקה בסעיפים הקודמים, הרבה פעמים הסעיף האחרון , הוא מסכם בצורה קצת שונה את כל השאלה.
2.בכל מקרה בו פועל כוח הולך וגדל נגד כיוון התנועה , המהירות תגדל בקצב הולך וקטן ,בתאוצה הולכת וקטנה, עד שהתאוצה תהיה אפס .
והגוף יגיע למהירויות המקסימאלית.
3. סעיף זה נשען על הבנת הדינמיקה בסעיפים הקודמים, הרבה פעמים הסעיף האחרון , הוא מסכם בצורה קצת שונה את כל השאלה.
______________________________________________________________________________________