פסיפס 12C - Ai
1. Cube-1: הפרדה ישרת זווית וחיבור בשיטת ההיטלים
פעולת הפרדה ישרת זווית
הפרדה ישרת זווית היא פעולה באמצעותה ניתן לקבל שני וקטורים ניצבים השקולים לוקטור אחד נתון.
שני הוקטורים המתקבלים רכיבי הוקטור או היטלי הוקטור.
דוגמה: בתרשים הבא מתואר וקטור M הנטוי בזווית «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨24px¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#945;«/mi»«/mstyle»«/math» מעל האופק.
נתון כי גודלו של הוקטור M הוא 20 יח' וערך הזווית «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨24px¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#945;«/mi»«/mstyle»«/math» הוא 40 מעלות.
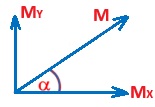
נבצע הפרדה ישרת לווקטור M לכיוון האופקי ולכיוון האנכי. נסמן את רכיב הוקטור M בכיוון האופקי ב- «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»M«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»X«/mi»«/msub»«/math» ואת רכיב הוקטור M בכיוון האנכי ב- «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»M«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»Y«/mi»«/msub»«/math», כמתואר באיור הבא:
גודלי הווקטורים מיוצגים על ידי אורכם, לכן מתקיים:
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»cos«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»(«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#945;«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«msub»«mi mathvariant=¨bold¨»M«/mi»«mi mathvariant=¨bold¨»X«/mi»«/msub»«mi mathvariant=¨bold¨»M«/mi»«/mfrac»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#160;«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#160;«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#160;«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#160;«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#160;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»sin«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»(«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#945;«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»MY«/mi»«mi mathvariant=¨bold¨»M«/mi»«/mfrac»«mspace linebreak=¨newline¨/»«mspace linebreak=¨newline¨/»«/mstyle»«/math»
נשתמש בפונקציות סינוס וקוסינוס כדי לבטא את היטלי הוקטור כתלות בגודלו ובכיוונו של הווקטור הנתון, ובכך נבצע את פעולת ההפרדה הישרת זווית:
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨22px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»M«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»Y«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»M«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»sin«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»(«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#945;«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»20«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»sin«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»(«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»40«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#1497;§#1495;«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»12«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»85«/mn»«mspace linebreak=¨newline¨/»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»M«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»X«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»M«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»cos«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»(«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#945;«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»20«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»cos«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»(«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»40«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#1497;§#1495;«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»15«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»32«/mn»«/mstyle»«/math»
לסיכום: נתון וקטור M גודלו 20 יח' שכיוונו 40 מעלות מעל האופק. בעזרת פעולת הפרדה ישרת זווית ניתן למצוא שני וקטורים «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»M«/mi»«mrow mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»X«/mi»«mo mathvariant=¨bold¨»§#160;«/mo»«/mrow»«/msub»«/mstyle»«/math» ו- «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»M«/mi»«mrow mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»Y«/mi»«mo mathvariant=¨bold¨»§#160;«/mo»«/mrow»«/msub»«/mstyle»«/math» הניצבים לוקטור M ושקולים לו.
שימו לב:
1. בהתאם לגודלו וכיוונו של הווקטור ניתן לבצע פעולת הפרדה ישרת זווית לכל וקטור נתון.
2. בפעולת הפרדה ישרת זווית רכיב אחד מתקבל בעזרת פונקציית הסינוס והרכיב השני בעזרת פונקציית הקוסינוס.
3. הפעולה נקראת הפרדה ישרת זווית כיוון שמהפעולה מתקבלים שני וקטורים ניצבים מווקטור אחד נתון.
4. בהתאם לשיטת המקבילית, הסכום הוקטורי של שני רכיבי הוקטור המתקבלים שווים לווקטור הנתון.
5. לאחר ביצוע פעולת הפרדה ישרת זווית מקובל לסמן על הווקטור השקול שני קווים מקבילים לסימון ביטולו.
6. בפעולה למציאת וקטור שקול מתקבל וקטור אחד השקול לשני וקטורים נתונים.
פעולת הפרדה ישרת זווית היא פעולה הפוכה, מתקבלים ממנה שני וקטורים השקולים לווקטור הנתון.
חיבור וקטורים בשיטת ההיטלים
שיטת ההיטלים היא שיטה למציאת הוקטור השקול לוקטורים שאינם ניצבים.
בשיטה זו, אנחנו משתמשים בפעולת הפרדה ישרת זווית כדי להגיע מוקטורים שאינם ניצבים לוקטורים שקולים וניצבים.
ניתן לחשב את הוקטור השקול לוקטורים הניצבים בעזרת משפט פיתגורס ופונקצית הטנגנס.
דוגמה: נתונים שני וקטורים שאינם ניצבים «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mover mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»A«/mi»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«/math» ו- «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mover mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»B«/mi»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«/math».
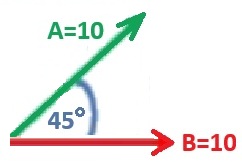
כדי למצוא את הוקטור השקול לשני הוקטורים הנתונים בעזרת שיטת ההיטלים, יש לבצע את השלבים הבאים:
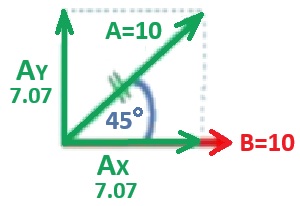
שלב א' - הפרדה ישרת זווית לוקטור «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mover mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»A«/mi»«mo»§#8594;«/mo»«/mover»«/math» לשני וקטורים ניצבים, האחד בכיוון האופקי «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»A«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»X«/mi»«/msub»«/mstyle»«/math» והשני לכיוון האנכי «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»A«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»Y«/mi»«/msub»«/mstyle»«/math».
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨22px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»A«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»Y«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»A«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»sin«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»(«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#945;«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»10«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»sin«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»(«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»45«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#1497;§#1495;«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»7«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»07«/mn»«mspace linebreak=¨newline¨/»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»A«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»X«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»A«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»cos«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»(«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#945;«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»10«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#183;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»cos«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»(«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»45«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#1497;§#1495;«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»7«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»07«/mn»«/mstyle»«/math»
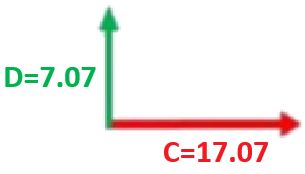
שלב ב' - יש לחבר את שני הוקטורים בכיוון האופקי הווקטור B והווקטור «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»A«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»X«/mi»«/msub»«/mstyle»«/math» . כך שמתקבלים שני וקטורים ניצבים השקולים לשני הוקטורים הנתונים.
נסמן את הווקטור השקול בכיוון האופקי ב- C ואת הוקטור השקול בכיוון האנכי ב- D.
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨22px¨»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»C«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold-italic¨ mathcolor=¨#0000FF¨»B«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»+«/mo»«msub»«mi mathvariant=¨bold-italic¨ mathcolor=¨#0000FF¨»A«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»X«/mi»«/msub»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»10«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»+«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»7«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»07«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#1497;§#1495;«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»17«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»07«/mn»«mspace linebreak=¨newline¨/»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»D«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#1497;§#1495;«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»10«/mn»«/mstyle»«/math»
שלב ג' – מציאת וקטור שקול לשני הוקטורים הניצבים בעזרת משפט פיתגורס ופונקצית הטנגנס.
נסמן את הווקטור השקול כווקטור E.
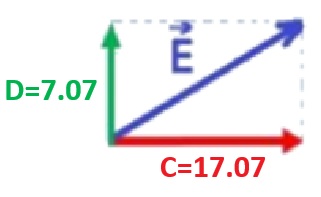
נחשב את גודלו של הווקטור E בעזרת משפט פיתגורס:
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨22px¨»«msup»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»E«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»2«/mn»«/msup»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«msup»«mi mathvariant=¨bold-italic¨ mathcolor=¨#0000FF¨»C«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»2«/mn»«/msup»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»+«/mo»«msup»«mi mathvariant=¨bold-italic¨ mathcolor=¨#0000FF¨»D«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»2«/mn»«/msup»«mspace linebreak=¨newline¨/»«mrow»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»E«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«msqrt mathcolor=¨#0000FF¨»«msup»«mi mathvariant=¨bold-italic¨»C«/mi»«mn mathvariant=¨bold¨»2«/mn»«/msup»«mo mathvariant=¨bold¨»+«/mo»«msup»«mi mathvariant=¨bold-italic¨»D«/mi»«mn mathvariant=¨bold¨»2«/mn»«/msup»«/msqrt»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«msqrt mathcolor=¨#0000FF¨»«mn mathvariant=¨bold¨»17«/mn»«mo mathvariant=¨bold¨».«/mo»«msup»«mn mathvariant=¨bold¨»07«/mn»«mn mathvariant=¨bold¨»2«/mn»«/msup»«mo mathvariant=¨bold¨»+«/mo»«mn mathvariant=¨bold¨»7«/mn»«mo mathvariant=¨bold¨».«/mo»«msup»«mn mathvariant=¨bold¨»07«/mn»«mn mathvariant=¨bold¨»2«/mn»«/msup»«/msqrt»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#1497;§#1495;«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»18«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»47«/mn»«/mrow»«/mstyle»«/math»
נחשב את כיוונו של הווקטור E בעזרת פונקצית הטנגנס:
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mrow»«mspace linebreak=¨newline¨/»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»tan«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»(«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»§#945;«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mstyle mathvariant=¨bold¨ mathsize=¨22px¨»«mi»D«/mi»«/mstyle»«mstyle mathvariant=¨bold¨ mathsize=¨22px¨»«mi»C«/mi»«/mstyle»«/mfrac»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mstyle mathvariant=¨bold¨ mathsize=¨22px¨»«mn»7«/mn»«mo».«/mo»«mn»07«/mn»«/mstyle»«mstyle mathvariant=¨bold¨ mathsize=¨22px¨»«mn»17«/mn»«mo».«/mo»«mn»07«/mn»«/mstyle»«/mfrac»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»0«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»41«/mn»«/mrow»«mspace linebreak=¨newline¨/»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»§#945;«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»shift«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»§#160;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»tan«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»(«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»0«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»41«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»22«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»49«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨ mathsize=¨22px¨»§#176;«/mo»«/math»
לסיכום הוקטור השקול לשני הוקטורים A ו- B הנתונים הוא וקטור שגודלו 18.47 יח' וכיוונו 22.49 מעלות מעל האופק.
שימו לב:
1. שני הוקטורים המופיעים בדוגמה D ו- E שקולים לשני הוקטורים הנתונים.
למעשה פעולת הפרדה ישרת זווית ניתן לעבור מכל שני וקטורים נתונים לא ניצבים לשני וקטורים ניצבים להם.
וכך לחשב את גדולו וכיוונו של הווקטור השקול בחישוב מדויק.
2.פעולת הפרדה ישרת זווית חשובה גם במקרים בהם נוח להתייחס לשני וקטורים ניצבים הפועלים בכיוונים נוחים במקום להתייחס לכוח אחד הפועל בכיוון לא נוח להבנה.
באיור הבא מתואר גוף המונח על מישור משופע ומסומן עליו כוח הכובד W ורכיביו.
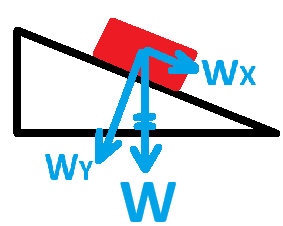
כוח הכובד פועל כלפי מטה, נוח לבצע הפרדה ישרת זווית לכוח הכובד לשני כוחות ניצבים, כוח «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»W«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»X«/mi»«/msub»«/mstyle»«/math» בכיוון מורד המישור
וכוח «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»W«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»Y«/mi»«/msub»«/mstyle»«/math» בכיוון ניצב למישור .
בפרק הדינמיקה נראה שרכיב הכוח «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»W«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»X«/mi»«/msub»«/mstyle»«/math» מתאר את המידה שבה כוח הכובד מניע את הגוף במורד המישור ורכיב הכוח «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»W«/mi»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»Y«/mi»«/msub»«/mstyle»«/math» מתאר את המידה שבה כוח הכובד מעיק על המישור הנטוי.