פסיפס 12B - Ai
1. חיבור וקטורי בשיטת המקבילית
הוקטור השקול
וקטור שקול הוא וקטור בודד שפועלתו שקולה לפעולתם של מספר וקטורים נתונים.
מפעולת החיבור הוקטורי מתקבל הוקטור השקול.
לדוגמה: נתונים שני כוחות הפועלים על גוף כוח «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»F«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»1«/mn»«/msub»«/mstyle»«/math» פועל ימינה וגודלו 40 ניוטון וכוח «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»F«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»2«/mn»«/msub»«/mstyle»«/math» פועל ימינה וגודלו 20 ניוטון.
כמוראה באיור הבא:
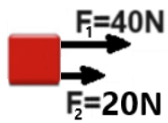
בהתאם לגודל ולכיוונם של הכוחות הנתונים גודלו של הכוח השקול הוא 60 ניוטון וכיוונו ימינה.
שימו לב:
1. יחידות הכוח הן ניוטון על שמו של הפיזיקאי אייזיק ניוטון. נעסוק ביחידות אלו בהרחבה בקורס הדינמיקה.
2. גודלו של הוקטור השקול לא תלוי רק בגודלם של הווקטורים הנתונים הוא תלוי גם בכיוונם.
כך למשל בדוגמה הנתונה אם כיוונו של הוקטור «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«msub»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»F«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#FF0000¨»2«/mn»«/msub»«/mstyle»«/math» היה שמאלה, כמוראה באיור הבא:

גודלו של הכוח השקול היה 20 ניוטון וכיוונו היה ימינה.
3. כאשר הוקטורים לא פועלים על אותו קו פעולה יש להשתמש באחת מהשיטות: שיטת המקבילית שיטת המשולש או שיטת ההיטלים.
4. מפעולת הסכום הוקטורי מתקבל הוקטור השקול. במקרים מסויימים כדי לבצע פעולת חיבור וקטורי יש לחבר את הגדלים של הוקטורים הנתונים (כפי שמתואר בדוגמה) . יש מקרים שבהם יש לחסר בין הגדלים של הוקטורים הנתונים(כמו בשימו לב 2). בכל מקרה הפעולה למציאת הוקטור השקול נקראת חיבור וקטורי.
5. בדינמיקה וקטור הכוח השקול מסומן על ידי «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«mi mathvariant=¨bold¨ mathcolor=¨#FF0000¨»§#931;F«/mi»«/mstyle»«/math».
מתמטית הוקטור השקול שווה לסכום הוקטורי של הוקטורים הנתונים בדוגמה הנתונה מתקיים: «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨20px¨»«mover mathcolor=¨#FF0000¨»«mi mathvariant=¨bold¨»§#931;F«/mi»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«mo mathvariant=¨bold¨ mathcolor=¨#FF0000¨»=«/mo»«mover mathcolor=¨#FF0000¨»«msub»«mi mathvariant=¨bold¨»F«/mi»«mn mathvariant=¨bold¨»1«/mn»«/msub»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«mo mathvariant=¨bold¨ mathcolor=¨#FF0000¨»+«/mo»«mover mathcolor=¨#FF0000¨»«msub»«mi mathvariant=¨bold¨»F«/mi»«mn mathvariant=¨bold¨»2«/mn»«/msub»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«/mstyle»«/math» .
שיטת המקבילית
שיטת המקבילית היא שיטה למציאת גודלו וכיוונו של הוקטור השקול של שני וקטורים נתונים שלא פועלים לאורך אותו ישר.
בשיטה זו יש להצמיד את הוקטורים בזנבותיהם, מבלי לשנות את גודלם ואת כיוונם ולהשתמש בבניית עזר ליצירת מקבילית משני הוקטורים הנתונים.
אלכסון חוצה המקבילית שזנבו צמוד לזנבות שני הוקטורים, הוא הוקטור השקול בגודלו ובכיוונו.
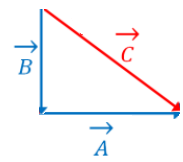
דוגמה: נתונים שני וקטורים ניצבים «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mover mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»A«/mi»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«/math» ו- «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mover mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»B«/mi»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«/math» כלשהם (לא דווקא כוחות) גודלו של כל אחד מהם הוא 10 יח'.
נתון שהוקטור «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mover mathcolor=¨#FF0000¨»«mi mathvariant=¨bold¨»C«/mi»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«/math» הוא שקול לשני וקטורים אלו ומתקיים: «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mover mathcolor=¨#FF0000¨»«mi mathvariant=¨bold¨»C«/mi»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mover mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»A«/mi»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»+«/mo»«mover mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»B«/mi»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«/math»
נמצא את הוקטור «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mover mathcolor=¨#FF0000¨»«mi mathvariant=¨bold¨»C«/mi»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«/math» בעזרת שיטת המקבילית:

כיוון ששני הוקטורים הנתונים הם ניצבים, ניתן להשתמש במשפט פיתגורס כדי למצוא את גודלו של הוקטור השקול. למציאת את כיוונו של הוקטור השקול נשתמש בטנגנס.

נחשב את גודלו של הווקטור C בעזרת משפט פיתגורס:
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨22px¨»«msup»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»C«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»2«/mn»«/msup»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«msup»«mi mathvariant=¨bold-italic¨ mathcolor=¨#0000FF¨»A«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»2«/mn»«/msup»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»+«/mo»«msup»«mi mathvariant=¨bold-italic¨ mathcolor=¨#0000FF¨»B«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»2«/mn»«/msup»«mspace linebreak=¨newline¨/»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»C«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«msqrt mathcolor=¨#0000FF¨»«msup»«mi mathvariant=¨bold-italic¨»A«/mi»«mn mathvariant=¨bold¨»2«/mn»«/msup»«mo mathvariant=¨bold¨»+«/mo»«msup»«mi mathvariant=¨bold-italic¨»B«/mi»«mn mathvariant=¨bold¨»2«/mn»«/msup»«/msqrt»«msqrt mathcolor=¨#0000FF¨»«msup»«mn mathvariant=¨bold¨»10«/mn»«mn mathvariant=¨bold¨»2«/mn»«/msup»«mo mathvariant=¨bold¨»+«/mo»«msup»«mn mathvariant=¨bold¨»10«/mn»«mn mathvariant=¨bold¨»2«/mn»«/msup»«/msqrt»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#1497;§#1495;«/mi»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»14«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨».«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»14«/mn»«/mstyle»«/math»
נחשב את כיוונו של הווקטור C בעזרת פונקצית הטנגנס:
«math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mstyle mathsize=¨22px¨»«mrow»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»tan«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»(«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#945;«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mstyle mathvariant=¨bold¨»«mi»B«/mi»«/mstyle»«mstyle mathvariant=¨bold¨»«mi»A«/mi»«/mstyle»«/mfrac»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mfrac mathcolor=¨#0000FF¨»«mstyle mathvariant=¨bold¨»«mn»10«/mn»«/mstyle»«mstyle mathvariant=¨bold¨»«mn»10«/mn»«/mstyle»«/mfrac»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»1«/mn»«/mrow»«mspace linebreak=¨newline¨/»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#945;«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»shift«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#160;«/mo»«mi mathvariant=¨bold¨ mathcolor=¨#0000FF¨»tan«/mi»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»(«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»1«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»)«/mo»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»=«/mo»«mn mathvariant=¨bold¨ mathcolor=¨#0000FF¨»45«/mn»«mo mathvariant=¨bold¨ mathcolor=¨#0000FF¨»§#176;«/mo»«/mstyle»«/math»
לכן, גודלו של הווקטור השקול הוא 14.14 יח וכיוונו 45 מעלות מתחת לכיוונו של הוקטור A.
שימו לב:
1. שיטת המקבילית מתאימה למציאת וקטור שקול לשני וקטורים בלבד.
2. ניתן להשתמש בשיטת המקבילית גם כאשר הוקטורים אינם ניצבים. במקרה כזה לא ניתן לבצע חישוב מדויק, אלא ניתן רק לבצע הערכה לגודלו וכיוונו של הוקטור השקול בעזרת קנה מידה בלבד.
שיטת המשולש
שיטת המשולש היא שיטה נוספת למציאת וקטור שקול לוקטורים נתונים.
בשיטה זו יש לחבר את כל הוקטורים "ראש לזנב". הוקטור שזנבו בזנב הוקטור הראשון וראשו בראש הוקטור האחרון הוא הוקטור השקול בגודלו ובכיוונו.
נמצא את הוקטור השקול לשני הוקטורים הנתונים «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mover mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»A«/mi»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«/math» ו- «math xmlns=¨http://www.w3.org/1998/Math/MathML¨»«mover mathcolor=¨#0000FF¨»«mi mathvariant=¨bold¨»B«/mi»«mo mathvariant=¨bold¨»§#8594;«/mo»«/mover»«/math» הנתונים בדוגמה הקודמת בעזרת שיטת המשולש:

מתקבל משולש ישר זווית זהה למשולש הנתון בדוגמה הקודמת. ניתן למצוא את גודל של הווקטור השקול בעזרת משפט פיתגורס ואת כיוונו של הווקטור השקול בעזרת פונקצית הטנגנס.
1. אין חשיבות לסדר חיבור הוקטורים, ניתן לחבר את הוקטורים הנתונים בדוגמה "ראש לזנב" גם באופן הבא:
2. בשונה משיטת המקבילית, בשיטת המשולש ניתן לחבר יותר משני וקטורים נתונים.
3. נעסוק בעיקר בחיבור וקטורים בשיטת המקבילית, חשוב להכיר גם את שיטת המשולש.